Техніка та обладнання

Використання роботів у сільському господарстві
21.03.2017
5623

Давно відомий факт: за використання хімічних засобів захисту рослин частково знижується урожайність вирощуваної культури — навіть за застосування останніх розробок в області трансгенної інженерії та хімії захисту рослин.
Більш того, хімікати повністю не розчиняються і не розпадаються на безпечні хімічні сполуки протягом вегетації рослин. І як наслідок, їхні залишки акумулюються у вегетативній частині, коренеплодах, ягодах тощо. Деякі із цих засобів мають явно виражені ознаки канцерогенності, що у підсумку призводить до накопичення цих речовин у тканинах і органах людини і, ясна річ, не сприяє збереженню здоров’я та тривалості життя. І зрештою їхнє застосування призводить до екологічної проблеми, що має поки що не загрозливу, але все ж помітну тенденцію до прогресування у цьому секторі сільського господарства. І це триває вже кілька десятків років.
Останнім часом, із появою і поступовим збільшенням частки використання робототехніки у сільському господарстві, фахівці молодої компанії Deepfield Robotics, яка входить до складу концерну Bosch, поставили собі за мету докорінно змінити цю ситуацію. Вони вирішили розробити і втілити у життя таку технологію вирощування культур, яка б не потребувала внесення хімічних засобів захисту в грунт. На Міжнародній конференції IEEE із питань інтелектуальних систем і роботів (IEEE International Conference on Intelligent Robots and Systems, IROS) було вперше презентовано сільськогосподарського робота — втілення цього задуму в металі.
Основна ідея цієї технології — повна відмова від хімічних засобів захисту на користь фізичних. Що мається на увазі під фізичним захистом? Розробники прогресивної компанії запропонували знищувати бур’яни фізично, але не вручну, як колись — шляхом використання виснажливої людської праці, а з допомогою «розумного» молотка, який просто вганяв би всю вегетативну частину бур’яну назад, у землю.
Повністю ця технологія ще не налагоджена, однак основні риси і технологічне опрацювання вже є. Цей «розумний» молоток змонтовано на колісному шасі робота (BoniRob).
З допомогою машинного «зору» робот направляє своє знаряддя саме на бур’яни, і його робочий орган — молоток працює досить активно: із частотою удару в одну десяту частку секунди!
Можна припустити, що цей робот зробить марну роботу: мовляв, бур’яни ж при цьому не викорінюються, а лише «заганяються» у землю, але ж вони мають властивість знову розростатися із ще більшою силою. Так, але їхнє подальше відростання почнеться зовсім не за кілька годин, до того ж цього робота можна запускати на поле стільки разів, скільки буде потрібно. Адже він не хоче спати, не втомлюється і може працювати цілодобово. Вже цікаво звучить, чи не так?
Тому варто перейти до опису конструкційної будови робота, і на кожному із його компонентів слід зупинитися детально, оскільки вони заслуговують на таку увагу.
Цей «розумний» агрегат має вигляд чотиривісної платформи із мотор-колесами на кожній осі. Останні, своєю чергою, мають як мінімум два ступені свободи кожна (тобто колесо може повертатися в обидва боки), а сама напрямна вісь може притискатися до «тіла» (остова) робота для зручності транспортування (фото 1). «Тіло» робота має прямокутну форму зі скосами на кутах для кріплення «ніг». Також робот оснащено антенами радіозв’язку для передачі телеметрії, двочастотним GPS-модулем. По всьому периметру остова робота встановлено стоп-кнопки для вимикання електроживлення у разі незапланованої програмою і оператором поведінки машини.
«Тіло» робота має посередині спеціальний виріз кубічної форми для змінних модулів корисного навантаження. Сама платформа може витримувати корисний вантаж до 150 кг. Розробники порахували найвигіднішим варіант придбання їхнього виробу, коли замовник (покупець) бере для користування одного робота і кілька змінних модулів із корисним навантаженням, що дає змогу поєднувати функції для виконання всього циклу агроприйомів на полі (від основного обробітку грунту до обприскування і проведення фізичного знищення бур’янів).
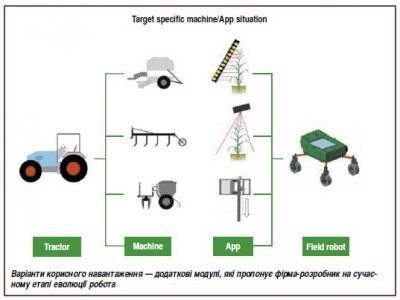 Завдяки спеціально розробленому продажевому сервісу покупець під час купівлі робота може відмовитись від непотрібних модулів і з доплатою придбати саме те, що треба для виконання запланованих агрозаходів. Тобто виробник паралельно вирішує питання логістики, які гнучко враховують побажання клієнтів, а також надає сервісну підтримку користувачу їхнього виробу протягом усього періоду вегетації і збирання культур (рисунок). Також розробники працюють над вирішенням питання про можливість одночасного використання декількох роботів під час виконання роботи (у вигляді «зграї»). На жаль, конкретнішої інформації про можливості й особливості такого поєднаного застосування, як і про досягнення у цьому напрямі фірма практично не публікує, і тому зрозуміти, чого слід очікувати від нових розробок, досить важко.
Завдяки спеціально розробленому продажевому сервісу покупець під час купівлі робота може відмовитись від непотрібних модулів і з доплатою придбати саме те, що треба для виконання запланованих агрозаходів. Тобто виробник паралельно вирішує питання логістики, які гнучко враховують побажання клієнтів, а також надає сервісну підтримку користувачу їхнього виробу протягом усього періоду вегетації і збирання культур (рисунок). Також розробники працюють над вирішенням питання про можливість одночасного використання декількох роботів під час виконання роботи (у вигляді «зграї»). На жаль, конкретнішої інформації про можливості й особливості такого поєднаного застосування, як і про досягнення у цьому напрямі фірма практично не публікує, і тому зрозуміти, чого слід очікувати від нових розробок, досить важко.
На борту робота встановлено електричний (на час тестування) двигун, проте передбачено також і можливість застосування традиційного ДВЗ для роботи в польових умовах. Робот сконструйовано таким чином, що генератор виробляє потрібну енергію для електродвигунів і має запас палива на 24 год. Машинним «зором» робота керує автопілот разом із комп’ютером, ультразвуковим сканером, камерами бокового огляду.
Робочих камер, що забезпечують так званий машинний «зір» і керують обробітком грунту, кілька: широкозахватна камера, вузькозахватна та інфрачервона. Напрямок «зору» всіх трьох спрямовано вниз, під «черево» робота, тобто в робочу зону агрегату. За призначенням широкозахватна камера забезпечує створення попередньої, динамічної, картинки стану грунту, також дає зображення сільськогосподарської культури разом із бур’янами. Вузькозахватна камера потрібна безпосередньо для керування роботою «молота» для «забивання» бур’янів, а інфрачервона — для уточнення цільових об’єктів, що сприяє чіткій роботі обладнання й уникненню різного роду помилок.
Розглянемо детальніше роботу самого «молота». Він являє собою рухомий штир, виконаний із інструментальної сталі невеликого діаметра (1 см) і встановлений у знімному модулі. Працює за допомогою електродвигуна і спеціального зворотно-поступального ударного механізму. Сам по собі інструмент не становить ніякого інтересу без комп’ютерного забезпечення та координації роботи тим самим машинним «зором». Головне, що вдалося розробникам, — це запрограмувати таку польову «зброю» на боротьбу без помилок: робот чітко розпізнає визначені види бур’янів на полі і не завдає шкоди нецільовому об’єкту. Є, звичайно, труднощі у швидкості роботи за дуже щільного покриття поля бур’янами. Робот за максимальної щільності бур’янів може рухатися зі швидкістю до 9 см/с (або 32,4 км/год). Для прискорення роботи розроблено платформи із лінійним розміщенням «молотів» (фото 2, 3).
 Ударний «молот» робота BoniRob за своєю енергетикою може «забити» бур’ян у землю всього на 3 см. Зроблено це спеціально із розрахунком на створення сприятливого середовища для перегнивання бур’янів у прикореневому шарі грунту, що принесе користь культурним рослинам, до того ж така глибина дії «молота» не зумовить грунтового ущільнення понад критичний для культури рівень. Тому машинний «зір» «молота» спрямований на молоді пагони бур’янів, які робот визначає за допомогою ширококутної камери за кольором, відтінком, формою їхньої листкової пластинки. Однак робот може працювати і з «дорослими» бур’янами — для цього запрограмовано уповільнення його швидкості і цілу серію ударів «молота» із високою частотою — до 1/10 с. На фото 4 показано внутрішню частину модуля корисного навантаження із маховиком «молота» (зліва) і камерою із високою роздільною здатністю (справа).
Ударний «молот» робота BoniRob за своєю енергетикою може «забити» бур’ян у землю всього на 3 см. Зроблено це спеціально із розрахунком на створення сприятливого середовища для перегнивання бур’янів у прикореневому шарі грунту, що принесе користь культурним рослинам, до того ж така глибина дії «молота» не зумовить грунтового ущільнення понад критичний для культури рівень. Тому машинний «зір» «молота» спрямований на молоді пагони бур’янів, які робот визначає за допомогою ширококутної камери за кольором, відтінком, формою їхньої листкової пластинки. Однак робот може працювати і з «дорослими» бур’янами — для цього запрограмовано уповільнення його швидкості і цілу серію ударів «молота» із високою частотою — до 1/10 с. На фото 4 показано внутрішню частину модуля корисного навантаження із маховиком «молота» (зліва) і камерою із високою роздільною здатністю (справа).
У прес-релізі компанії згадується тестовий полігон із посівом моркви, рослини якої було висіяно із густотою не більше ніж 2 см одна від одної. Водночас бур’яни мали щільність до 20 рослин/м2. Ось на такому полі проводили тестування робота (вважалося, що це досить складні полігонні умови). Робот рухався із робочою швидкістю не більше 3,7 см/с (13 км/год). При цьому ударна продуктивність «молота» становила 1,75 рослини бур’яну за секунду (за максимальної щільності бур’янів до 50 шт./м2).
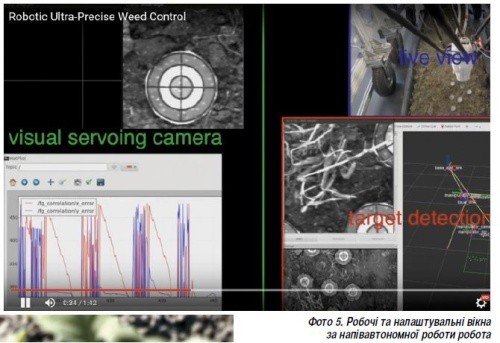
Для унаочнення і створення первинної уяви, як відбувається прийняття відповідного рішення під час виконання завдань роботом, подаємо одночасно кілька знімків робочих вікон із комп’ютерів і камер машинного «зору» (фото 5).
Фото 5 потребує кількох пояснень. Зокрема, у лівому верхньому кутку показано одну із кількох десятків стандартних мішеней, які використовували розробники для відпрацювання цілі для роботи «молота». Судячи із самої мішені, робот буде «цілитися» або в стебло бур’яну, або в центр його суцвіття, щоб виключити помилки удару по самому листю бур’яну. Зверніть увагу, що на мішені зображено випадково розташовані білі крапки, імовірно, вони і дають «засвічення» під час зйомки вузькокутовою камерою із високою роздільною здатністю. Розробники таким чином працюють із різними за кольором і будовою бур’янами, у яких неоднакова кольорова гама за стеблом і паростками.
У правому верхньому куті камера так званого запису наживо маніпуляцій робота. На фото, замість «молота», показано технологічний фен, який струменем повітря здував мішені. На етапі налагодження розробники вважали цей варіант прийнятним з точки зору економії. У лівому нижньому кутку — он-лайн налагодження роботи сервомеханізмів. Це вікно показувало накопичення горизонтальних і вертикальних помилок: різкі діагональні лінії означають скидання цих помилок після відпрацювання «молота» по кожній мішені. І нарешті — в правому нижньому кутку подано картинку дії машинного «зору» робота. Тобто виявлення, супровід і відпрацювання кожної мішені, яку бачить камера із високою роздільною здатністю. Звичайно, зрозуміти, як працює «мозок» робота щодо аналізу та селекції цілей, виходячи тільки з одного рисунка, проблематично. Однак загальна схема роботи зрозуміла: під час проведення зйомки камерою відбувається загальний аналіз «картинки» на предмет ідентифікації бур’янів за певними ознаками: їхньою формою, будовою, забарвленням, — які закладено в пам’ять комп’ютера. Після цього робот будує матрицю цілей та аналізує колірні характеристики бур’янів, потім активує «молот» і задає параметри цілі для його роботи (місце розташування цільового об’єкта та нахил), і зрештою останній проводить удар по мішені. Цікава і поки не зрозуміла методика перенесення координат із «картинки» в пам’яті комп’ютера на реальну робочу зону «молота». Адже вони різні за своєю суттю: пласка «картинка» у «мозку» робота і нерівне та покрите рослинами робоче поле. До того ж це сприйняття цілі відбувається під час руху робота, тому накопичуються помилки у роботі «молота», які позначаються, як уже було сказано вище, горизонтальними і вертикальними зміщеннями, що, своєю чергою, зобов’язує робота коректувати свої налаштування для забезпечення адекватної роботи свого ударного інструмента.
 На фото 6 предмет довгастої форми у вертикальному зображенні — робочий елемент «молота» у момент, коли бур’ян (світліше зображення внизу знімка із двома розміщеними по обидва боки листками) уже «забито» у грунт. У момент удару по об’єкту (фото 6) на «молот» може налипнути вологий грунт, частки бур’яну тощо. Спочатку розробники вирішили зчищати залишки грунту і фрагменти рослин спеціально закріпленими на штанзі знімачами, при цьому штир-«молот» повністю входив у спеціальну нішу (її добре видно на фото 2, 3). Проте згодом вирішили залишити «молот» у первісному вигляді, просто подовжили його і підняли модуль трохи вище. Наскільки правильне це рішення, покаже час і практика застосування пристрою на фермах в реальних робочих умовах.
На фото 6 предмет довгастої форми у вертикальному зображенні — робочий елемент «молота» у момент, коли бур’ян (світліше зображення внизу знімка із двома розміщеними по обидва боки листками) уже «забито» у грунт. У момент удару по об’єкту (фото 6) на «молот» може налипнути вологий грунт, частки бур’яну тощо. Спочатку розробники вирішили зчищати залишки грунту і фрагменти рослин спеціально закріпленими на штанзі знімачами, при цьому штир-«молот» повністю входив у спеціальну нішу (її добре видно на фото 2, 3). Проте згодом вирішили залишити «молот» у первісному вигляді, просто подовжили його і підняли модуль трохи вище. Наскільки правильне це рішення, покаже час і практика застосування пристрою на фермах в реальних робочих умовах.
Ідеологія віддаленої (дистанційної) ферми. Фірми «Амазоне» і «Бош» після презентації сільськогосподарського робота приділили увагу також ідеології використання таких пристроїв. Обидві фірми розглядають сільське господарство недалекого майбутнього як інформаційний простір, який матиме зворотний зв’язок із фермером. Тобто робот не тільки самостійно оброблятиме грунт із рослинами, але і збиратиме інформацію про стан рослинного покриву та визначатиме агрохімічні характеристики грунту. Для цих цілей для робота передбачено кілька змінних модулів вузьконаправленого наукового характеру: для відбору й аналізу грунтових зразків, спектрального аналізу флори тощо. Виходячи із номенклатури та кількості змінних модулів, буде розроблено і станцію техобслуговування для швидкої зміни останніх, яка розташовуватиметься поблизу місця роботи роботів.
На перших порах роботом керуватиме дистанційно оператор. Поступово, із накопиченням баз даних щодо обробки полів, логістики та порядку використання обладнання, робот може абсолютно самостійно проводити агроприйоми, звітуючи про їхнє виконання дистанційно — за допомогою, наприклад, мережі Wi-Fi. У такому разі робот не обов’язково має збирати і накопичувати початкові дані — вся потрібна інформація може бути закладена у програму. Побудова такої інформаційної мережі можлива, наприклад, за участю дрона. Тобто спочатку проводять обстежувальний обліт території поля, складають технологічну карту, а після цього завантажують її в програму робота і виводять його в поле.
М. Солоха, ст. наук. співробітник,
ННЦ «Інститут ґрунтознавства та агрохімії імені О.Н. Соколовського»
Інформація для цитування
Використання роботів у сільському господарстві / М. Солоха // Пропозиція. — 2016. — №7 — С. 174-177
Попередня стаття
Наступна стаття





Читайте також



Інтерв'ю

FAO не тільки переймається питанням, як нагодувати людство, а й намагається спрогнозувати прийдешнє АПК. Яким буде сільське господарство через 10 років, розповідає експерт FAO, українець Андрій Ярмак.

Nestlé в Україні активно співпрацює з місцевими постачальниками. За даними на кінець 2016 року, близько 70% компонентів для товарів компанія купує на місцевому локальному ринку. Із 2007 року
Статті














1
0